
Systemy automatyczne mikrokomputer Drozdow
- Pruszków, mazowieckie
- 13 Lip 16:31
- Nr ogłoszenia: 68576652
- Dostępność: dostępne
1 / 2
Obserwuj
- Oferta od osoby prywatnej
- Stan używane
- Okładka twarda
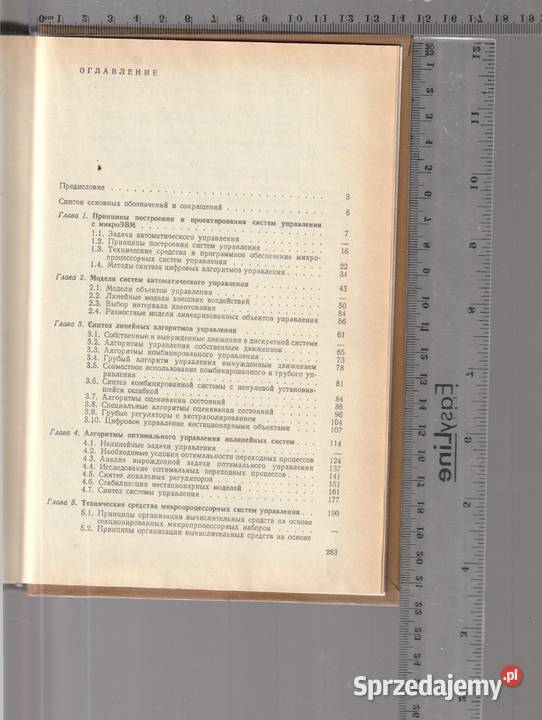
1.1. Задачи автоматического управления
Предисловие
..
0
Список основных обозначений и сокращений
Глава 1. Принципы построения и проектирования систем управления с микроЭВМ
1.2. Принципы построения систем управления
1.3. Технические средства и программное обеспечение микро- процессорных систем управления
1.4. Методы синтеза цифровых алгоритмов управления.
Глава 2. Модели систем автоматического управления 2.1. Модели объектов управления
2.2. Линейные модели внешних воздействий 2.3. Выбор интервала квантования
2.4. Разностные модели линеаризованных объектов управления
Глава 3. Синтез линейных алгоритмов управления
43
19 21 ore
4.7. Синтез системы управления.
3.6. Синтез комбинированной системы с ненулевой установив- шейся ошибкой
3.7. Алгоритмы оценивания состояний
3.8. Специальные алгоритмы оценивания состояний 3.9. Грубые регуляторы с экстраполированием
3.10. Цифровое управление нестационарными объектами
Глава 4. Алгоритмы оптимального управления нелинейных систем 4.1. Нелинейные задачи управления
4.2. Необходимые условия оптимальности переходных процессов 4.3. Анализ вырожденной задачи оптимального управления 4.4. Исследование оптимальных переходных процессов. 4.5. Синтез локальных регуляторов
4.6. Стабилизация нестационарных моделей
Глава 5. Технические средства микропроцессорных систем управления. 5.1. Принципы организации вычислительных средств на основе секционированных микропроцессорных наборов
5.2. Принципы организации вычислительных средств на основе
3.1. Собственные и вынужденные движения в дискретной системе 3.2. Алгоритмы управления собственным движением. 3.3. Алгоритмы комбинированного управления. 3.4. Грубый алгоритм управления вынужденным движением 3.5. Совместное использование комбинированного и грубого уп- равления
Karton 189
Skontaktuj się
Henryk
Liczba odsłon: 116
Zgłoś nadużycie
298,88 zł

